Процесс навигации скважины Применение системы связи «Светофор» и методов смены целей в геонавигации

Чтобы перейти к первой части статьи, нажмите ЗДЕСЬ
Для перехода на вторую часть статьи нажмите ЗДЕСЬ
Тандем геонавигатора и оператора наклонно-направленного бурения (ННБ)
Как ни рассматривай геонавигацию, там всегда будет присутствовать ограниченный набор точной информации, элементы которой разбросаны по всей траектории скважины. Когда востребована геонавигация, ничем нельзя заменить геологическое и техническое понимание участка, на котором ведется бурение, а также крайне важна способность, достаточно хорошо приближаться к реальности, и принимать информированные решения по навигационному управлению. Поэтому, никогда нельзя игнорировать или недооценивать человеческий фактор в геонавигации. Несмотря на то, что в геонавигации применяется наиболее продвинутое оборудование, ответ на основной и наиболее важный вопрос «двигаться дальше вверх или вниз?» всегда сможет дать только инженер-геонавигатор, а выполнить маневр сможет лишь оператор ННБ.
Отношения между геонавигатором и оператором ННБ являются наиболее важным элементом из всего, что способствует успеху в процессе геонавигации.
Данная статья подробно описывает наиболее важные аспекты процесса коммуникации между геонавигатором и оператором ННБ; частоту передачи инструкций (сигналов), тип информации, а также конкретные обстоятельства, при которых информацию следует передавать.
Коммуникация с оператором наклонно-направленного бурения (ННБ)
Геонавигатор — это человек, который посредством анализа данных в реальном времени и их интерпретации, обладает всей полнотой информации, необходимой для направления скважины в пределах узкой горизонтально расположенной цели. Однако, именно оператор ННБ сможет физически провести скважину в правильном направлении. Хорошие отношения между геонавигатором и оператором ННБ зачастую определяют конечный успех всей операции.
Времени, потраченному на улучшение отношений между геонавигатором и оператором ННБ следует уделять первоочередное внимание, и включать его в полную стоимость любых операций по геонавигации. Рекомендуется, чтобы команда по геонавигации, т.е. геонавигатор и оператор ННБ, до начала бурения проводили некоторое ценное время в общении, создающем определенную стоимость, и посвященном проверке позиций друг друга, подтверждающем взаимопонимание поставленных задач геонавигации. Понимание намерений геонавигатора позволит оператору ННБ более адекватно реагировать на его команды.
Также очень важно выстраивать процесс коммуникации в обоих направлениях. Операторы ННБ обладают наиболее лучшим пониманием особенностей работы КНБК и ее реакций на переориентирование, когда она эксплуатируется надлежащим образом. Это пойдет на благо всей операции управления, и будет способствовать более эффективному и действенному выполнению маневров. Отсюда следует, что обе стороны равноответственны за развитие крепких отношений.
Ключевая информация, необходимая для навигации горизонтальной скважины
Одной из наиболее важных задач геонавигатора является передача оператору ННБ сигналов относительно направления движения. Чтобы обеспечить адекватное направление движения, геонавигатору требуются четыре блока данных:
1) Положение долота в трехмерном пространстве
Одним из способов показать положение долота в трехмерном подземном пространстве является использование координат X, Y, Z (рисунок 1). Если геологические цели определены координатами X, Y, Z, трехмерное расстоянием между долотом и геометрической целью можно измерить. Координаты, однако, не дают информации о положении долота относительно фактического положения пласта. Они также не уточняют фактическое положение цели в отношении того же текущего положения пласта.

2) Стратиграфическое положение долота
Стратиграфическое положение означает положение долота относительно целевого продуктивного пласта (напр., конкретного стратиграфического элемента продуктивного пласта – см. также рисунок 2). Оно определяет вертикальное и горизонтальное расстояние (напр., в футах) до цели (при нахождении снаружи) и относительное расстояние до фундамента и кровли цели (при нахождении внутри).

Знание стратиграфического положения долота дает возможность уточнить геометрические границы целевого продуктивного пласта на данном отрезке ствола скважины; а также определить количество свободного пространства над и под долотом, в случае, если потребуется изменить направление бурения (при условии, что известны вертикальные и горизонтальные размеры целевого пласта). Эта задача частично решается измерением абсолютной глубины посредством маркшейдерских замеров, поскольку о положении долота можно судить, беря в учет предполагаемую толщину целевого пласта. Однако, следует также учесть, что толщина цели по горизонтали может значительно варьироваться на протяжении всей траектории ствола скважины.
3) Наклон пласта
Чтобы должным образом корректировать угол наклона траектории и удерживать проходку в пределах целевой зоны, нужно оценить угол наклона пласта (см. рисунок 3). Постоянный расчет наклона пласта усиливает потенциал интерпретации структурных данных и обеспечивает информацией о вариациях стратиграфической толщины пласта в горизонтальном направлении.

Очень важно различать видимый наклон и истинное падение пласта, поскольку это два разных геометрических свойства целевого пласта. Наиболее точное измерение наклона пласта обеспечивает азимутальный каротаж ствола.
Следует отметить, что в случае если ствол бурится перпендикулярно направлению плоскости наклона пласта, будет невозможно оценить значение его фактического наклона.
4) Факторы, которые невозможно учесть до начала бурения
Сюда могут относиться разломы, либо любые иные препятствия, которые нельзя предвидеть до начала бурения (см. рисунок 4). Расположение мелких тектонических нарушений, которые сложно определить сейсмически (со сбросом менее 30 футов, что является средним пределом сейсмического обнаружения), обычно невозможно предвидеть. Хотя до начала бурения возможно наличие общего знания зон с преобладанием сейсмически незначительных разломов, такие малые разломы имеют тенденцию развиваться на очень ограниченное расстояние. Обычно, также не хватает и контрольных скважин, чтобы иметь информацию об точном расположении таких разломов. Практически, единственной возможностью здесь является попытка определять их вдоль участка бурения и немедленно реагировать на любой неожиданный выход траектории за пределы нужной целевой зоны.

Другое привычное препятствие, которое невозможно смягчить до начала бурения, это горизонты, насыщенные кремнистым сланцем, которые особенно присутствуют в известняковых пластах. Данная очень твердая порода, состоящая из кремнезема (также известного как кремень) обычно вызывает повреждения КНБК, и значительно препятствует возможностям управления КНБК. В случаях захвата ниже или выше насыщенных кремнием горизонтов, твердая кремневая порода приводит к сильной отдаче на долото или его деформации, что приводит к необходимости периодической перенастройки направления бурения. Хотя практически невозможно прогнозировать горизонты, насыщенные кремнием, вдоль траектории бурения скважины, все же возможно осуществлять разбуривание кремниевых пород, применяя достаточный угол атаки.
Геонавигатор должен исполнять свои обязанности таким образом, чтобы все четыре ключевых блока информации были известны в любой момент операции бурения, на любой точке траектории скважины.
S.M.A.R.T.-коммуникация
Получив данные по всем четырем блокам информации, в любой определенной точке траектории бурения, геонавигатор должен определить наиболее оптимальное направление бурения, и сообщить его оператору наклонно-направленного бурения (ННБ).
Информация о направлении бурения должна соответствовать следующим принципам:
• Она должна быть оформлена ясным и логичным языком, и легко восприниматься, невзирая на любые обстоятельства (напр., состояние стресса);
• Она должна быть передана оператору ННБ независимо от количества времени, доступного для общения (напр., в случае спешки);
• Она должна быть совместима с любым оборудованием связи, доступным геонавигатору и оператору ННБ (напр., общение по телефону, письменное сообщение, мессенджер, очная беседа).
Другими словами, сообщение должно быть живым и умным (по-английски S.M.A.R.T – мнемоническая аббревиатура, использованная Джорджем Дюраном, в 1981 г., т.е. сообщение должно быть Specific (Конкретным), Measurable (измеряемым), Attainable (достижимым), Relevant (адекватным), Time-based (контролируемым по времени):
1) Конкретность (Specific)
Должно присутстовать ясное понимание значения на каротажной диаграмме, и должно предприниматься соответствующее реагирование. Указания по размещению скважины довольно часто даются необдуманно, на основе изначально неверной интерпретации сигналов с каротажных приборов и датчиков. Единственная причина изменения угла наклона скважины это изменение геологической обстановки. Кроме того, все решения по направлению бурения должны учитывать всю имеющуюся в наличии геологическую и техническую информацию, а не только отдельные ее части.
2) Измеряемость (Measurable)
Требуемые изменения траектории скважины должны выражаться в цифрах, определяющих необходимый угол наклона скважины, глубину по вертикали, и глубину по стволу. В дополнение, количественно выраженная поправка должна уточнять значение глубины по вертикали и угла наклона скважины, при данном имеющемся значении глубины по стволу. Использование описательных инструкций здесь исключается.
3) Выполнимость (Attainable)
Запрос к оператору ННБ осуществить невозможный маневр не будет умным. (Здесь игра слов, мнемоника S.M.A.R.T и “smart” (по англ., умный), прим. пер.). У каждой КНБК различные возможности по управлению и ограничения, которые следует учитывать. Данные возможности и ограничения должны быть ясными и общеизвестными. Нет смысла просить осуществить определенный угол набора кривизны на определенном интервале, если КНБК не в состоянии его выполнить.
4) Адекватность (Relevant)
По умолчанию, изменение направления бурения должно происходить, только если возникают очевидные предпосылки к этому, а не просто на основании какого-либо предчувствия, что «что-то может пойти не так». Корректировка управления должна быть также адекватной обстоятельствам. Дополнение к углу наклона, которое потребует превышения значения в 3 градуса может быть оправдано лишь в случае аварийно опасной ситуации, когда может случиться выход за пределы целевого продуктивного пласта.
5) Контролируемость по времени (Time-based), а еще точнее, по глубине ствола
Никогда недостаточно запроса информации по глубине по вертикали (ГВ), без предварительного уточнения того, на какой глубине по стволу будет находиться требуемая точка ГВ. Это расстояние также позволит определить и требуемый угол наклона (а также интенсивность отклонения), чтобы осуществить маневр. Заметьте, пожалуйста, что одно и то же значение глубины по вертикали, которое требуется получить в пределах двух разных расстояний глубины по стволу, даст в результате два различных значения угла наклона, необходимого для выполнения маневра.
Система связи «Светофор»
Одним из наиболее живых и подвижных методов коммуникации между геонавигатором и оператором ННБ является система «Светофор». Эта система – эффективный и действенный метод быстрой коммуникации, исключающей ненужные недоразумения.
Геонавигатор, определяя цвет маневра (зеленый, желтый или красный), и сообщая его оператору ННБ, устанавливает уровень срочности действия, и определяет способ, которым данная корректировка будет исполнена. Это, разумеется, будет зависеть от ситуации и обстоятельств. Определенный уровень критичности позволяет оператору ННБ немедленно оценить необходимую скорость маневра, какой коэффициент управления должен быть выбран в приложении к инструменту, и какие значения интенсивности отклонения и скорости проходки потребуются для данной корректировки. Система «Светофор» не только позволяет передавать сообщения, но и «описывает» окружающую обстановку вокруг КНБК, с которой приходится иметь дело. Более подробную информацию можно найти на рисунках 5 и 6.

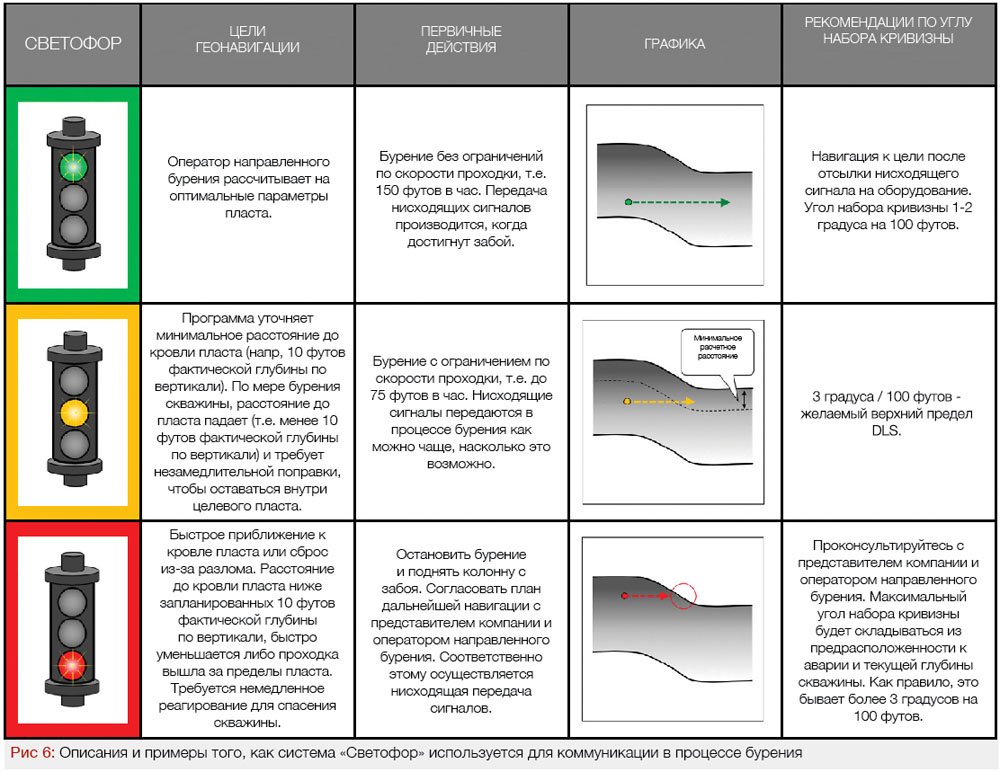
Система связи «Светофор» включает в себя:
• Green command
Нормальный, неспешный маневр внутри целевого пласта. Типичное значение интенсивности отклонения (ИО) варьируется от 2 до 2,5 градусов на 100 футов (либо используются иные значения ИО, обговоренные до бурения), скорость проходки не ограничивается, сигналы на оборудование посылаются в процессе бурения и коэффициент управления ННБ устанавливается в пределах 50%. Азимут и угол наклона можно корректировать одновременно.
• Желтый сигнал
Требуется срочный маневр и значительное изменение направления бурения, когда траектория скважины либо приближается, либо уже достигла кровли пласта. Типичное значение ИО все еще в пределах до 3 градусов на 100 футов, скорость проходки ограничивается, чтобы не позволить сигналам запаздывать к процессу бурения. Коэффициент управления ННБ увеличивается до 70%. Корректировки по вертикали выполняются прежде чем вносятся изменения по азимуту.
• Красный сигнал
Маневр в условиях аварийной ситуации — если его не выполнить правильно, возможна потеря скважины. Ситуация красного сигнала может возникнуть когда, например, траектория бурения вышла за пределы продуктивного пласта в перекрывающие породы. Точные значения ИО для маневра по красному сигналу определяются конкретными обстоятельствами, и условиями для каждой корректировки траектории и управляемостью КНБК. Обычно, они могут достигать значений намного выше 3 градусов на 100 футов. Бурение следует остановить, и посылать сигналы на оборудование в условиях остановленной проходки. Необходимы консультации и согласования между всеми сторонами. Обычно, в таких ситуациях, бурильщик ННБ использует 100%-ный коэффициент управления оборудованием ННБ.


Методы смены целей
После того, как конкретный уровень срочности маневра определен, и передан оператору ННБ, также важно передать оператору новую цель для нового направления бурения.
Это достигается двумя способами:
1) Уточнением угла наклона и глубины по вертикали, на определенном расстоянии глубины по стволу, в пределах которого нужно достичь требуемой глубины по вертикали
Здесь геонавигатор принимает решение по новой цели, лежащей впереди (с координатами XYZ) и углу наклона скважины в точке новой цели (точнее – по углу наклона, который будет у скважины в точке новой цели). Геонавигатор не уточняет значение угла наклона, которое понадобится бурильщику ННБ, чтобы достичь новой цели, оставляя решение, как выполнять этот маневр, за ним самим. Заметьте, пожалуйста, что в данной ситуации оператор ННБ свободен осуществлять корректировку угла наклона и коэффициента управления ННБ по своему усмотрению.
2) Уточнением угла наклона новой цели
Здесь геонавигатор производит расчет и решает сам, какой угол наклона потребуется, чтобы выполнить задачу бурения скважины на «х» футов глубины по вертикали и в пределах «х» футов расстояния глубины по стволу. Оператор ННБ выполняет маневр, устанавливая требуемый темп набора или сброса кривизны. Заметьте, пожалуйста, что в данной ситуации оператор ННБ не знает ни о новой цели, ни о требуемой величине углу наклона, необходимого на новой цели (координаты XYZ новой цели и угол наклона на новой цели еще не определены).
Обычно, посредством данного вида смены целей (изменяя угол наклона только, без уточнения фактической новой цели, лежащей впереди), траектория скважины будет идти стратиграфически неопределенно (угол наклона ниже/выше угла наклона пласта). Зачастую, ошибочно допускается, что данным способом можно отыскать наиболее оптимальную зону. Это сомнительное утверждение довольно рискованно, и не должно приниматься на веру.
Обычно, маневр второго типа достигает более крутого угла наклона (отмечены красными кругами на рисунке), а также более высокого значение ИО. Форма данной траектории более похожа на синусоиду. Угол наклона в точке новой цели также не определен (точнее говоря, угол наклона, который будет у скважины после достижения новой цели). Оператор ННБ также не знает о цели геонавигатора, и поэтому не может соответственно корректировать коэффициент управления ННБ, и определять точку начала набора/сброса кривизны.


Это не оптимальный вариант. По возможности, следует определить для новой цели глубину по вертикали, и угол наклона на данной глубине по стволу (см. также рисунок 10 с более подробной информацией).
Вышеупомянутые примеры представляют собой наиболее уместные способы смены целей в геонавигации. Зачастую непросто объяснить разницу между фактическими результатами применения одного метода, либо другого, и это остается на усмотрение широкой публики (а еще чаще, для суждения в среде самих геонавигаторов).
Их можно классифицировать и систематизировать следующим образом:
1) Векторный метод (также именуемый «бурением по линии»)
Данный метод предполагает, что цель находится на линии с данным углом падения. Метод векторного прицеливания создает плавные переходы между целями и предоставляет достаточную свободу оператору ННБ устанавливать цель (на линии). В случае, если геологическое окружение вынуждает выбрать другую цель, оператору ННБ предоставляется новая линия на цель – определенный угол наклона с определенными допусками по горизонту – и, он устанавливает новую цель.
2) Точечный метод (также именуемый «бурением по точкам»).
Точечный метод навигации горизонтальных скважин основывается на выборе геонавигатором угла наклона новой цели, под которым скважина будет буриться. Геонавигатор полагается только на собственные навыки расчета угла наклона, необходимого для пересечения целевой точки глубины по вертикали в определенной точке горизонтального отрезка (на определенной глубине скважины по стволу). Хотя данный метод обычно позволяет пересекать все обозначенные новые цели, в то же самое время, он предоставляет минимальный контроль над выбором угла наклона ствола скважины между целевыми точками, поскольку оператор ННБ не участвует в процессе выбора значений угла наклона. Данный подход постоянно создает ситуации «мимо цели», когда требуется немедленная корректировка траектории скважины после того, как цель пройдена.
Соответственно, это ограничивает подвижность оператора ННБ в работе, и создает больший объем работы для всей команды геонавигации. Данный метод также характерен большим числом сигналов. В некоторых случаях, волнообразная форма траектории может приводить к потере скважины.
Рисунок ниже представляет траекторию, которая пересекла все необходимые цели, однако показывает довольно испорченную картину воздействия на пласт. Заметьте, пожалуйста, что все цели можно было пересечь намного более плавной траекторией.
Выводы и рекомендации
Геонавигатор должен всегда стремиться выбирать наиболее безопасное положение для скважины, положение, способствующее более быстрой реакции на изменяющуюся геологию, и наиболее короткую траекторию скважины, не допускающую выхода траектории скважины за пределы целевого продуктивного пласта.

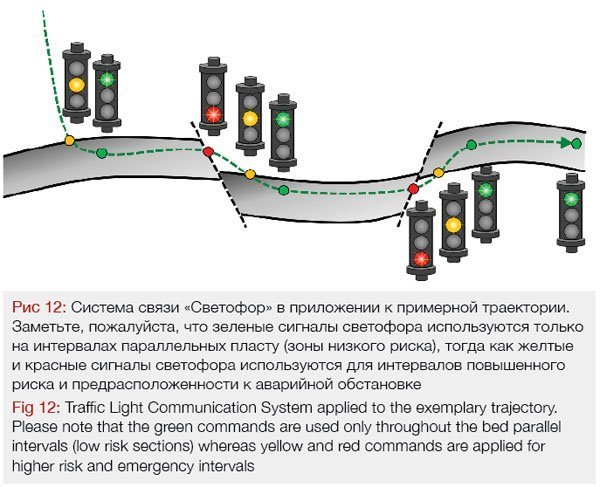

Первичное положение ствола скважины параллельно углу падения целевого пласта. Любая другая позиция (любой другой угол наклона скважины) рассматривается в качестве более рискованной, которой по возможности следует избегать, либо сводить к необходимому минимуму (рисунок 11). Позиция повышенного риска также называется транспортной секцией траектории скважины.
Принимая во внимание отрезки с низкими и высокими рисками (отмеченными на рисунке 11 зелеными и красным интервалами), рекомендуется проводить маневры с зеленым сигналом при прохождении отрезков параллельных пласту, а под желтым и красными сигналами «Светофора» осуществлять маневры при переходе через стратиграфические зоны, и при выходе за пределы пласта.
Равным образом, рекомендуется пользоваться точечным методом (метод точечного пространства) только при прохождении отрезков с низким риском (см. зеленые интервалы на рисунке 11). Здесь приемлем метод бурения по точкам, поскольку скважину бурится параллельно наклону целевого пласта, и траектория нуждается в минимальных поправках угла наклона. Но как только скважина начинает переход через стратиграфическую зону, достигает опасного положения относительно границ пласта, либо выходит за пределы пласта, следует применить метод бурения по линии (метод векторного определения целей).

Об авторе
ПИОТР ПРЖИБИЛО (PIOTR PRZYBYLO) приобрел ключевые технические и деловые навыки, позволившие ему пробурить несколько самых глубоких в мире скважин, с максимальной длиной ствола. Он ликвидирует разрыв между технической и коммерческой сторонами в нефте- и газодобывающей отрасли.
Является Основателем GEOMODES, компании, обучающей будущих специалистов в области геонавигации, и оптимизирует организационную структуру групп, для более эффективного приложения навыков. Он также является автором РУКОВОДСТВА ПО НАВИГАЦИИ ГОРИЗОНТАЛЬНЫХ СКВАЖИН (Amazon)– первого, когда- либо опубликованного полного руководства, которое должен иметь в своем арсенале каждый специалист по геонавигации.
Связаться с автором можно по адресу: piotr.przybylo@geomodes.com